AUTOGUIDA - CCD Soft 5Primi passi per l'utilizzo |
|
Con i dovuti accorgimenti, far funzionare l'autoguida non è difficile. In questa semplice guida il software utilizzato è CCD Soft 5, spesso a corredo di una camera SBIG, ma la procedura è adattabile a molti altri software. Per prima cosa è necessario mettere a punto il setup ed effettuare tutti i collegamenti elettrici tra autoguida e montatura. L'autoguida deve essere in grado di impartire alla montatura (nella quale deve essere regolata la velocità di guida) i 4 movimenti. 1 - Posizione dell'autoguida e controllo della montaturaE' consigliabile montare l'autoguida sull'ottica di ripresa in modo ortogonale rispetto agli assi della montatura, in modo cioè che i movimenti di AR e DEC della montatura risultino paralleli ad i lati dell'immagine ripresa dal sensore di guida. In questo modo le correzioni impartite alla montatura saranno nella maggior parte dei casi relative ad un solo motore, non rendendo necessario l'azionamento continuo dei due motori. Per verificare la corretta posizione č sufficiente eseguire dei movimenti in AR ed in DEC mentre il sensore sta riprendendo. Le stelle inquadrate dovranno lasciare delle strisciate parallele ad i lati dell'immagine:
L'altro aspetto da curare molto bene è il bilanciamento del telescopio, verificando bene in tutte le posizioni del telescopio e cercando di sistemare bene i vari cavi. Impostazioni del software CCD Soft (realtive all'autoguida)
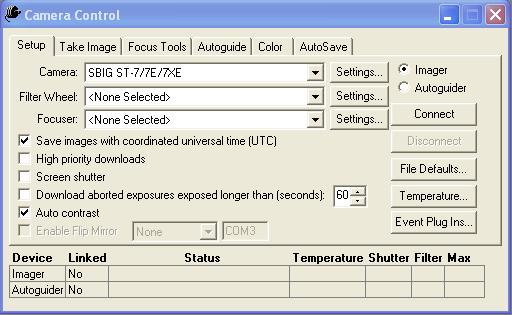
Il menù "Camera Control" è diviso in vari sottomenù: il primo, "Setup" permette di scegliere la camera usata. Se la camera è dotata di due sensori è necessario indicare quale sensore tra "Imager" o "Autoguider" si desidera utilizzare. Se non si dispone del secondo sensore scegliere esclusivamente "Imager".
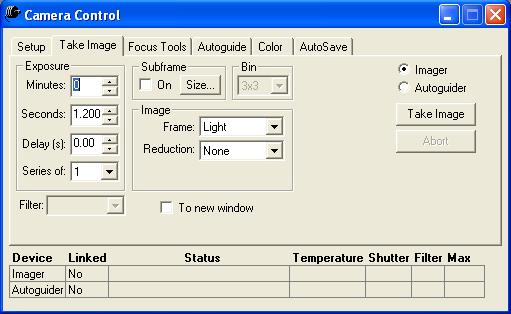
Nel menù "Take image" le funzioni utili per la guida sono il binning del sensore e la possibilità di attivare un subframe, utile in fase di calibrazione in presenza di molte stelle.
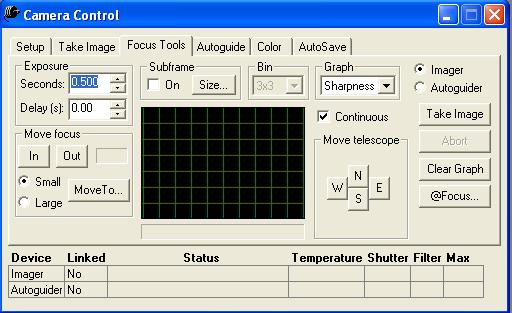
"Focus Tools" permette di riprendere immagini in successione per aggiustare la messa a fuoco, importante anche sul telescopio di guida.
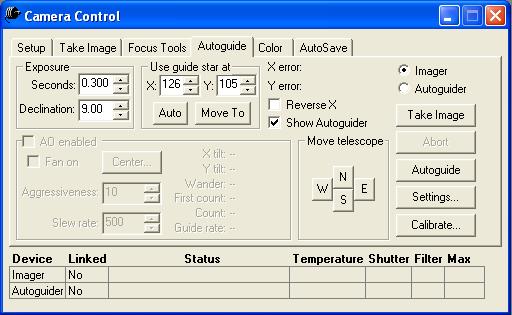
Nel menu "Autoguide" devono essere inseriti i primi dati per la guida:
Posizionare il telescopio in prossimitŕ dell'oggetto che intendiamo riprendere. Inserire la declinazione nell'apposito spazio (Declination). Inserire un tempo di esposizione (exposure) e riprendere un'immagine con il comando "take image". Verificare se ci sono stelle nell'inquadratura (è possibile muovere il telescopio e verificare i corretti movimenti dell'autoguida premendo i tasti N, E, S, W nel menù Move telescope). Se sono presenti stelle nell'inquadratura è necessario calibrare l'autoguida, cioè una procedura che muove il telescopio nelle 4 direzioni per un tempo impostato al fine di determinare la durata degli impulsi da impartire durante la guida per correggere gli errori rilevati. Lanciare la calibrazione con il comando "Calibrate":
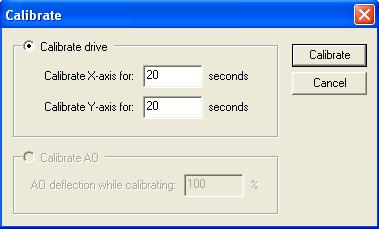
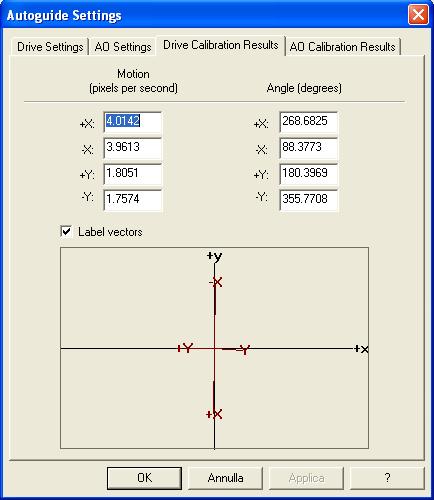
Inserire il tempo di calibrazione che puň essere diverso tra AR e DEC. Valori di 10-20 secondi possono andare bene, ma devono essere adattati in base al setup. Il risultato della calibrazione può essere positivo o negativo. Se tutto è perfetto la stella utilizzata per la guida si muoverà nelle 4 direzioni tornando esattamente al punto di partenza. Se invece il risultato è negativo il software fornirŕ un messaggio con l'errore riscontrato. I più comuni sono spostamento troppo basso della stella (aumentare il tempo di calirazione o aumentare la velocità di guida) oppure stella troppo vicina al bordo (ad esempio forse la stella scelta era troppo vicina al bordo, oppure il tempo di calibrazione è troppo eletato oppure velocità di guida troppo alta). Se invece il problema è in declinazione, durante l'inversione del moto (cioè la stella si sposta su un lato, ma non torna al punto di partenza rimanendo quasi ferma) molto probabilmente si tratta di un problema di backlash. Il backlash è un gioco sulla meccanica della montatura (tra i vari ingranaggi) che compromette le inversioni alle basse velocità, come appunto nel caso della guida. Il movimento avviene solo a livello di ingranaggi ma non viene trasmesso alla montatura che pertanto "perde" la correzione. Il backlash deve essere corretto a livello meccanico, ma alcuni software (e CCD Soft è tra questi) permette una correzione a livello software. Se invece la procedura è andata a buon fine è buona norma controllare il grafico risultante. Scegliere "Autoguide Setting" e poi "Drive Calibration Result":
Se il risultato del grafico è buono occorre passare alle impostazioni vere e proprie della fase di guida. Scegliere il menù "Drive Settings":
In questa pagina spesso si può trovare una soluzione se si hanno problemi durante la guida. Selezionare "advanced" per disporre di tutte le opzioni. In alto è possibile impostare una correzione del backlash, cioè è possibile inserire un tempo di correzione supplementare nel caso di inversione durante la guida. "Minimum Move" e "Maximum Move" permettono di stabilire il tempo massimo e minimo di correzione. Molto importante è il tempo massimo per evitare errori (dovuti a pixel caldi o altro) che potrebbero compromettere la posa. "Aggressiveness", cioè l'aggressività della guida consente di rendere il sistema più o meno aggressivo nelle correzioni. Se ogni correzione porta ad avere una sovracorrezione, cioè la guida passa continuamente da valori positivi a valori negativi, senza trovare un equilibrio è necessario diminuire l'aggressività del sistema. Se invece le correzioni non sono sufficienti a correggere l'errore ed il sistema "fatica" a correggere occorre aumentare l'aggressività "Delay after correction" consente di inserire una pausa tra una correzione e la successiva. A volte la cosa può essere utile. Se tutto è andato a buon fine possiamo far partire la guida:
I limiti di CCD Soft: Nella versione che ho provato il limite maggiore (secondo il mio parere) è avere un valore di aggressività della guida unico per entrambi gli assi. Spesso infatti la guida potrebbe essere ottimizzata usando valori diversi per l'asse AR e DEC. 17.03.2011 |